イタリアのロボットを動かす!
今回1月16日~18日東京ビッグサイトで開催されたロボデックス展に、ユアサ商事殿ブース内で出展しました。
第3回のロボデックス展 搬入日:外はとても静か、館内は大忙し!

最新ロボットから周辺機器、ロボット開発技術まで一堂に出展!


ロボットの周辺技術として、
1.電動グリッパー
2.ノイズ吸収シールドテープ
3.衝突吸収アームカバー
を紹介しました。
今回は、イタリア製の研究・実験教材ロボットをFA技術で動かした例を紹介します。
アルドゥイーノ ブラッチョというイタリア製実験教材ロボットです。

アルドゥイーノは、世界各国で使われているオープンソースハードウエアで、多くのソフトもオープンされています。
有名な図書「MAKERS―21世紀の産業革命が始まる」にも掲載されています。
https://www.amazon.co.jp/dp/B009SKVI90/ref=dp-kindle-redirect?_encoding=UTF8&btkr=1
今回の展示品は、このアルドゥイーノ基板で使うロボット「ブラッチョ」をFA技術で動かすことにしました。
https://ja.wikipedia.org/wiki/Arduino
FA(ファクトリーオートメーション)は直訳で工場の自動化ですが、ベルトコンベアなどの専用装置では空気圧機器と電動アクチュエータで組立・搬送を行い、その制御はPLC(プログラマブルロジックコントローラ)で行い、人間とのインターフェースHMI通称タッチパネルでスイッチ設定、ランプ表示等を行っています。
FA制御ではPLCとHMIを使いこなせる事が必須といえます。

このロボットの関節は、アナログのラジコンサーボを使っています。

ラジコンサーボは、モータ・減速ギア・角度センサ・その制御回路で構成されており、PWM入力によって角度制御を行われます。
PWMはパルスワイズモジュレーションの略で普通は20ms周期、パルス幅は0.5~1.5msを変化させることによって角度を制御します。
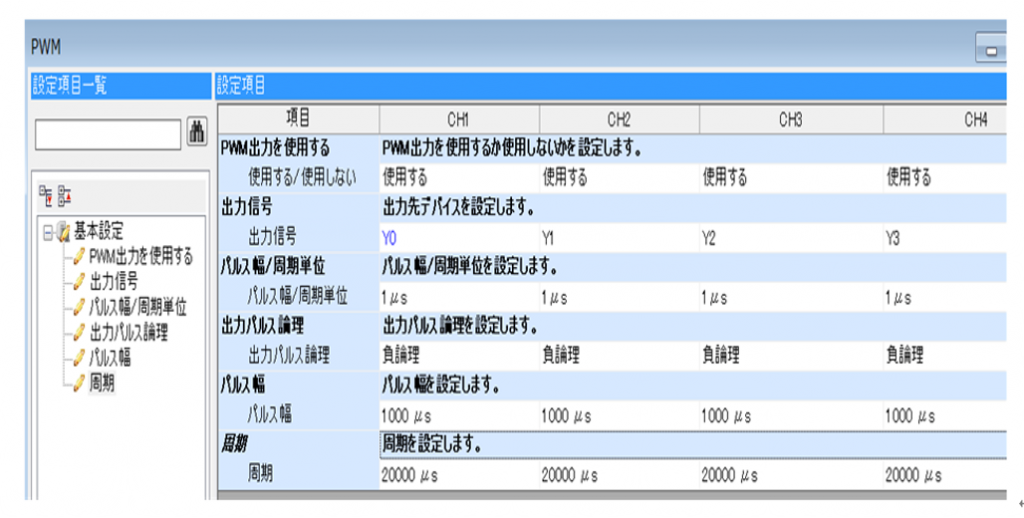
PLCに内蔵されているPWM出力を4CH使って軸制御を行います。

全体のシステムは、PLC(三菱製FX5U)を中心にタッチパネル(ミスミ製GX7)とロボット(アルドゥイーノ ブラッチョ)用端子基板経由ラジコンサーボJ1~J4へ接続されています。
PLCとタッチパネルはEthernetでプロトコルは三菱でオープンされているSLMPを使います。
一方、ロボット側はPWM出力4chをPLCの出力Y0-Y3を使って接続します。

蛇足ですが、FX5Uはコンパクトボディながらサーボモータのパルス列制御、RS485も標準的に内蔵され大変重宝がっています。
PWMの基本設定は図のように行いました。
タッチパネルの表示は左半分はロボット、右側はロボットハンドです。

・動作について
① 原点復帰

ラジコンサーボは5V電源とPWM入力信号の3ピンで、現在の回転角度が不明です。
そこで原点はロボットが垂直に立っている状態にしました。

タッチパネルのボタンで原点復帰指令を出すと、PWMのパルス幅を1500としPLCのY0-Y3に出力します。
すると、一気にロボットが垂直立ちしますが、通電前から垂直位置で抑えておけばサーボオンしても若干ショックが伝わる程度で済みます。

② 軸制御 J1-J4
J2の場合は原点1500から600に変化させると90度軸が揺動しますが、行き過ぎなのでちょうど良さそうな1200へ1500から-1ずつ引き算(デクリメント)し1200まで移動させます。
この時、デクリメントの演算間隔を調整することによって自由に速度が変わります。